Introduction of the project
The module consists of,
- Garmin V3HP LiDAR
- Servo motor: MG90S 9G Metal Gear Servo Motor
- Angular encoder: AS5047D (The encoder is used to measure the precise angle of the servo) (The encoder is used to measure the precise angle of the servo. Alternatively, we can calibrate the servo to known angles and develop a dynamic model of the device. The main issue with this is the time lag between the actual position and the commanded position. Thus, the encoder.)
- Microcontroller: raspberry Pi Pico (We use PIC32MX795 for the OSAVC)
- Range at Angle mode to accept an angle input, move the servo to that angle, and report the range from the LiDAR. In this mode, a microcontroller will give command to servo motor to rotate at a specific angle. So, the servo motor should turn a specified angle and attached LiDAR would also move. And a specific measurement of range from LiDAR and associated angle from the encoder should be reported back to the microcontroller.
- Constant Panning (with the servo) sweeping the LiDAR back and forth and reporting the range and angle (from the LiDAR and encoder, respectively) (You are free to integrate it with any microcontroller you prefer and have at hand). Panning here means, to move a LiDAR to focus on some particular objects, to get a sense of speed of these objects and filtering out the other background data. To rotate a LiDAR, we will use a servo motor. In this mode, we need to use servo motor to rotate a LiDAR to focus on some particular objects. At the same time, need to measure the range of LiDAR and the associate angle using the encoder.
- I2C --> Garmin V3HP LiDAR
- SPI --> AS5047D Angular encoder
- PWM --> MG90S Servo motor
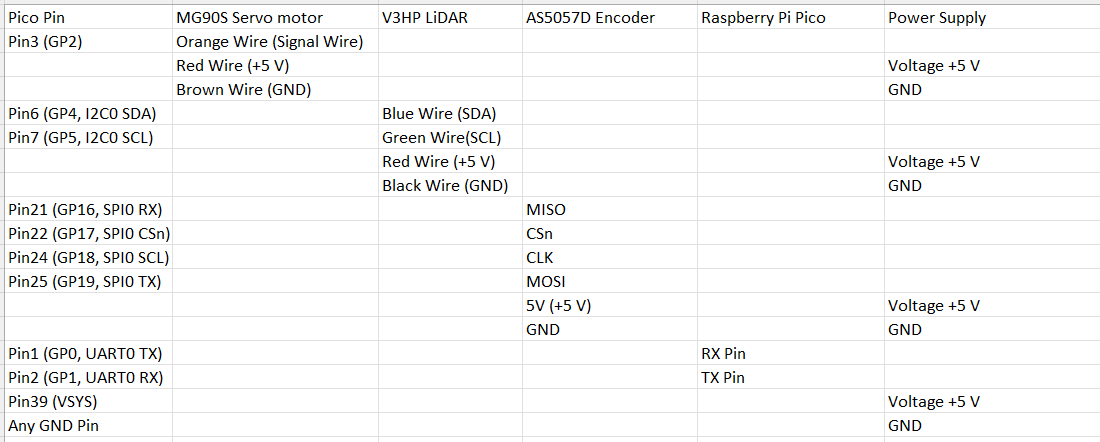
Pin Connection between different module with the Raspberry Pi Pico
Some glimpse of Assembled hardware

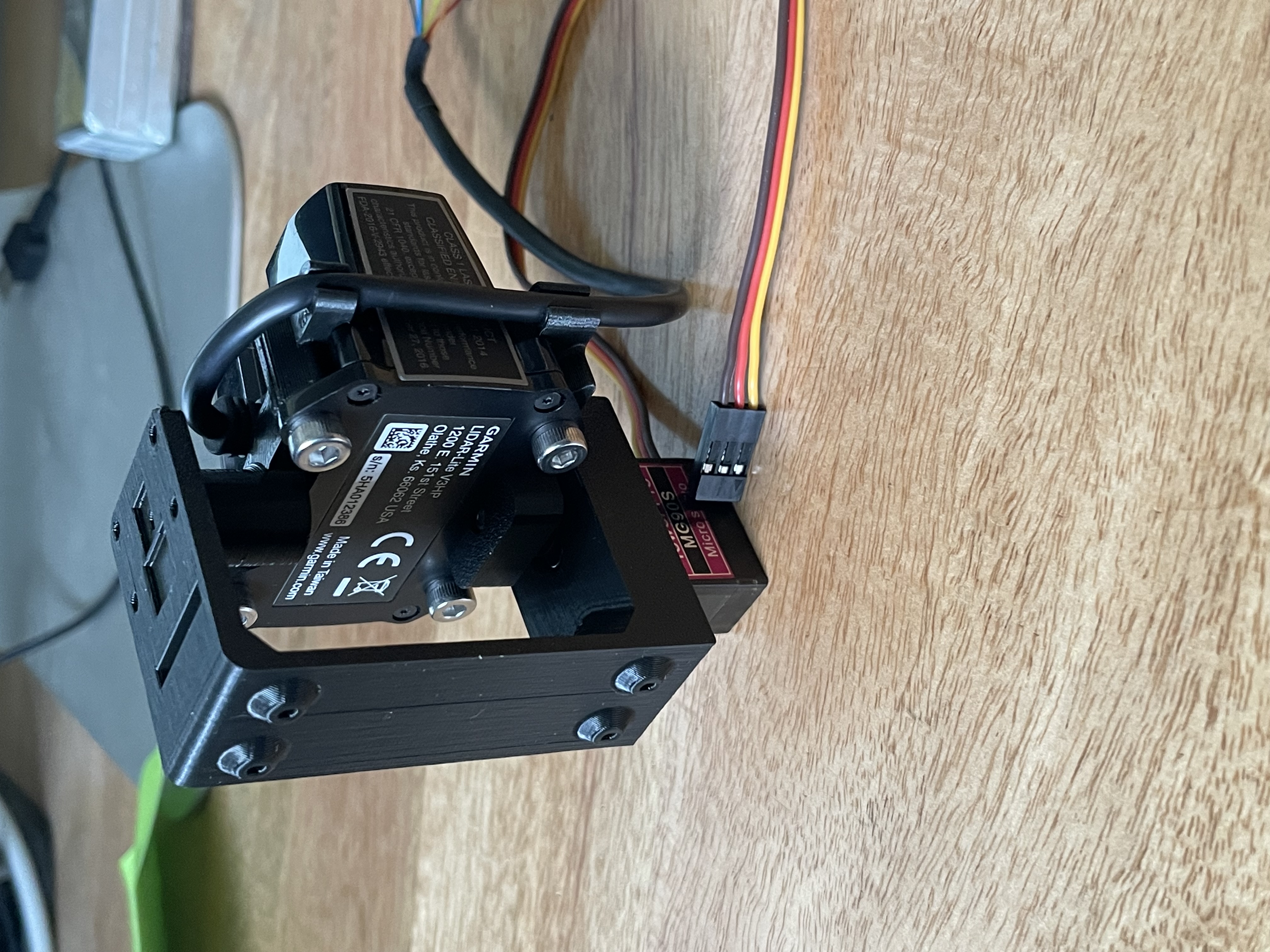 LiDAR module mounted on 3D printed holder. There is a MG90S servo motor at the bottom.
LiDAR module mounted on 3D printed holder. There is a MG90S servo motor at the bottom.
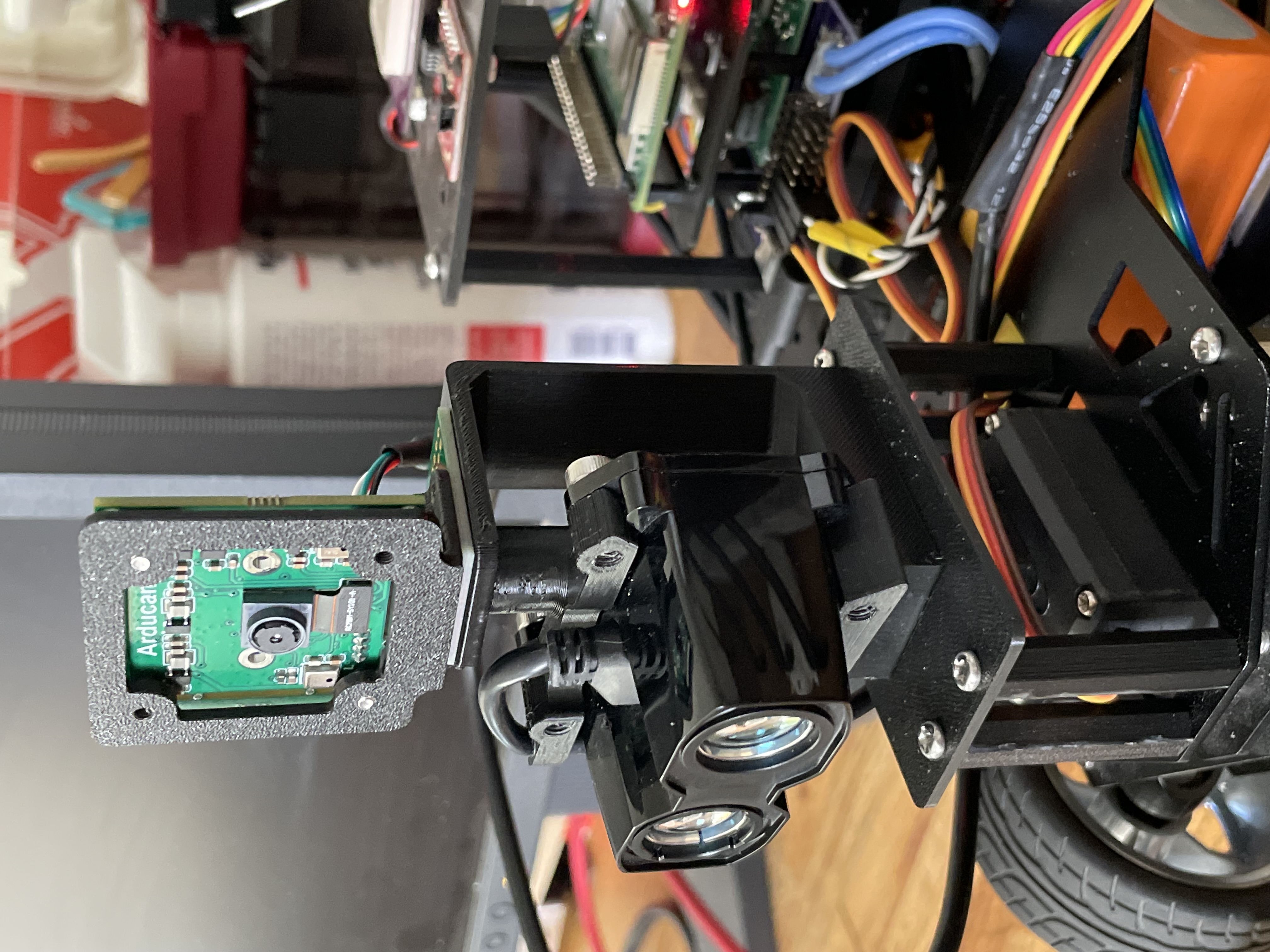 Added Raspberry Pi Camera Module and AS5047D magnetic rotary encoder. Encoder module is below the camera and is above the shaft.
Added Raspberry Pi Camera Module and AS5047D magnetic rotary encoder. Encoder module is below the camera and is above the shaft.
For more information refer documentation.