Light Detection and Ranging (LiDAR)
 Specification of V3HP LiDAR:
Specification of V3HP LiDAR:
- LiDAR is a ranging sensor
- High-speed Optical Distance Measurement Sensor
- Minimum measurement distance – 5 cm
- Maximum measure distance – 40 metre
- scan rate – 300 RPM
- scan resolution – 1°
- resolution: 1 cm
- Measurement Speed (Update Rate) – Greater than 1 kHz
- User configurability allows adjustment between accuracy, operating range and measurement time
- Communicates via I2C and PWM
- I2C: Fast-mode (400 kilobits/second), default 7-bit address 0x62, Internal register access and control
- Laser wavelength – 905 nm
- Pulse width - 0.5 μs (50% duty cycle)
- LiDAR measures velocity by calculating the difference between two frames.
Why to choose V3HP LiDAR?
Parameters kept in mind while selecting LiDAR module:
- Physically lightweight
- Long distance (40 meters)
- High accuracy
- Relatively inexpensive
- Suitable for outdoor usage
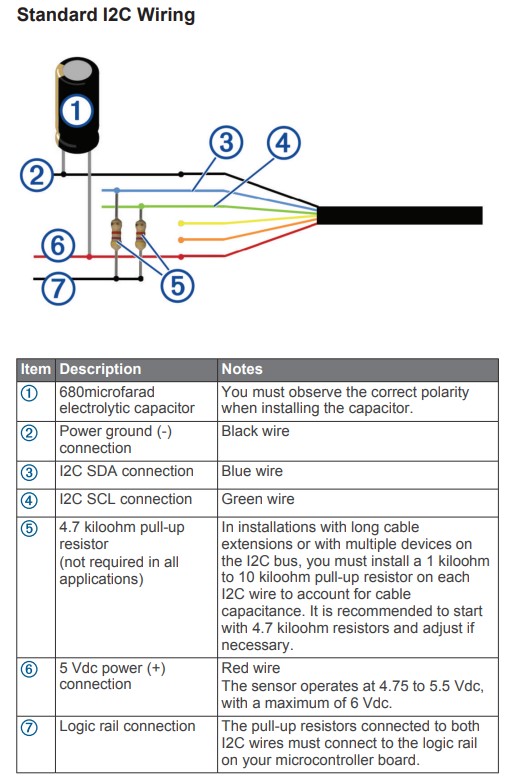
I2C Hardware Connection
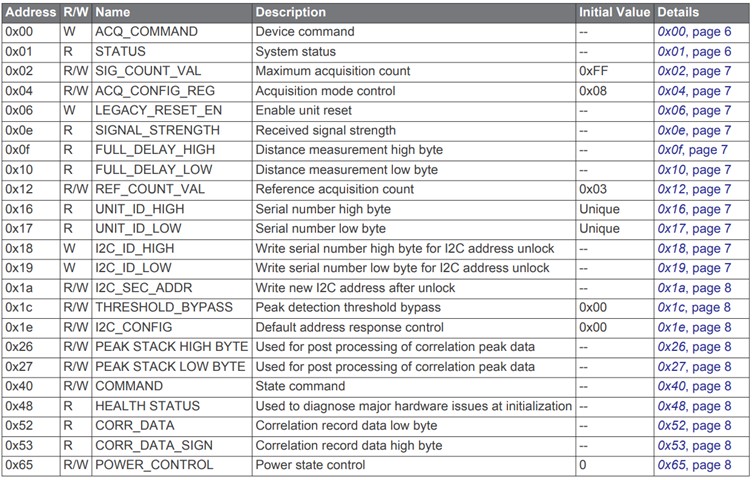
V3HP LiDAR Internal Register Address Map
Why I2C for communication? And introduction of I2C
- I2C is generally slower than other protocol such as SPI. But I2C takes less pins, this makes it preferable for low data rate sensors.
- I2C works in half duplex mode. SPI works in full duplex mode.
- I2C is a bus protocol and supports multiple masters.
- I2C buses:
- Serial Data (SDA): carries data
- Serial Clock (SCL): Clock Signal Line which synchronize data transfer between devices on I2C bus. This signal generated by the master device.
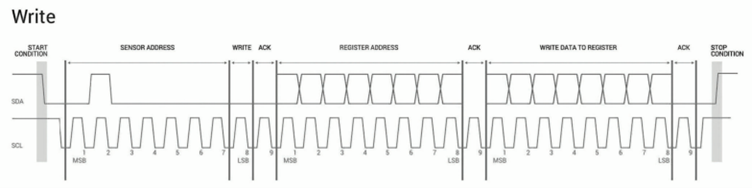
I2C Write Cycle
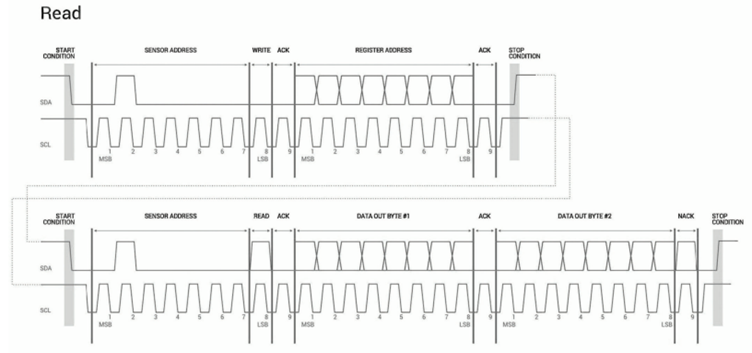
I2C Read Cycle
Useful Resources
Garmin V3HP LiDAR : Official WebsiteLiDAR Arduino Library: repository
LiDAR manual: here
For more information refer documentation.